Vergleichstest RTK-GNSS-Empfänger: Low-Cost contra High-End
Wir wollten wissen, ob es Unterschiede zwischen hochpreisigen und kostengünstigen RTK-GNSS-Empfängern gibt und haben deshalb deren Genauigkeit getestet.
Ohne einen GNSS-Empfänger würden automatische Lenksysteme oder auch das Section Control, z. B. an Pflanzenschutzspritzen, nicht funktionieren. GNSS steht dabei für „Global Navigation Satellite System“, also ein globales Satelliten-Navigationssystem.
Der elektronische Empfänger ist somit das Herzstück beim exakten Anschlussfahren oder bei teilschlagspezifischen Anwendungen. Und mit Hilfe der RTK-Korrektur lässt sich die Positionsgenauigkeit der Satellitenempfänger auf wenige Zentimeter verbessern. Die Hersteller von RTK-GNSS-Empfängern geben die Spur-zu-Spur-Genauigkeit meist mit +/- 2 bis 2,5 cm an.
Jetzt bestellen und weiterlesen!
profi - Das Fachmagazin für Landtechnik
Upgrade für Heftleser
Heftleser? Jetzt günstig upgraden!
25,80 EUR
/
Jahr
Profitieren Sie vom nahtlosen Überang zwischen Heft und Website
Zugang zu sämtlichen Inhalten auf profi.de
Zugriff auf alle profi Ausgaben und Sonderhefte (Digital)
Ohne einen GNSS-Empfänger würden automatische Lenksysteme oder auch das Section Control, z. B. an Pflanzenschutzspritzen, nicht funktionieren. GNSS steht dabei für „Global Navigation Satellite System“, also ein globales Satelliten-Navigationssystem.
Der elektronische Empfänger ist somit das Herzstück beim exakten Anschlussfahren oder bei teilschlagspezifischen Anwendungen. Und mit Hilfe der RTK-Korrektur lässt sich die Positionsgenauigkeit der Satellitenempfänger auf wenige Zentimeter verbessern. Die Hersteller von RTK-GNSS-Empfängern geben die Spur-zu-Spur-Genauigkeit meist mit +/- 2 bis 2,5 cm an.
Jetzt bestellen und weiterlesen!
profi - Das Fachmagazin für Landtechnik
Upgrade für Heftleser
Heftleser? Jetzt günstig upgraden!
25,80 EUR
/
Jahr
Profitieren Sie vom nahtlosen Überang zwischen Heft und Website
Zugang zu sämtlichen Inhalten auf profi.de
Zugriff auf alle profi Ausgaben und Sonderhefte (Digital)
Dies ist ein theoretischer Wert. In der Praxis spielen noch andere Einflussfaktoren eine Rolle. Im Gesamtsystem einer automatischen Lenkung ist mitentscheidend, wie gut die sogenannte IMU (Inertial Measurement Unit) mit den integrierten 3-D-Sensoren Nick- und Kippbewegungen des Schleppers ausgleicht und wie gut die Lenkhydraulik oder ein Elektromotor am Lenkrad die Lenkbefehle umsetzt. Und ganz wichtig: Die RTK-Korrektur muss möglichst ohne Unterbrechungen verfügbar sein. Hier kann es schon mal haken — vor allem wenn das Signal über Mobilfunk kommt und der Empfang gestört ist.
Große Preisspanne
Die Preisspanne bei den angebotenen GNSS-Empfängern ist groß. Sie beginnt bei den von uns getesteten Geräten bei nur rund 200 Euro für einen „nackten“ Empfänger-Chipsatz plus Antenne. Empfänger, die in einem Gehäuse verbaut sind und die der Hersteller für seine spezifische Applikation konfiguriert hat, stehen mit Preisen zwischen 2 100 und 6 500 Euro in der Liste, alle Preise ohne Mehrwertsteuer.
An dieser Stelle müssen wir eins vorweg klarstellen: Der GNSS-Empfänger ist in der Regel Bestandteil eines kompletten Lenksystems. Er lässt sich nicht einfach durch den Empfänger eines anderen Herstellers austauschen, obwohl es für die Datenausgabe den Standard NMEA 0183 gibt. Sie können also nicht ohne Weiteres einen kostengünstigen u-blox-Empfänger z. B. an ein Lenksystem von John Deere anschließen.
Trotzdem stellte sich uns die Frage, was kann der hochpreisige Empfänger mehr als der kostengünstige? Schließlich ist der GNSS-Empfänger die Basis für ein gut funktionierendes Lenksystem. Unterschiede bei den Antennen, der Verkabelung und den eingesetzten elektronischen Komponenten könnten sich auf die Genauigkeit auswirken. Auch die Signalverarbeitung ist entscheidend für eine genaue Positionsbestimmung. Insbesondere in der Bewegung ist das relevant, weil hier aus den Satellitensignalen zusätzlich die Fahrtrichtung und die Geschwindigkeit bestimmt werden.
Gemeinsam mit der Hochschule Weihenstephan-Triesdorf (HSWT) nahmen wir daher sieben Geräte unter die Lupe und testeten deren Genauigkeit und Zuverlässigkeit in der Bewegung und deren Verhalten bei Abschattung der Satellitensignale.
Einige technische Daten sowie die Preise der Empfänger haben wir in der Tabelle „Die GNSS-Empfänger im Vergleich“ auf Seite 92 zusammengestellt. Auch wenn manche technische Angabe nur für Insider interessant sein mag, so fällt auf, dass Agra-GPS und Satcon-System den gleichen Empfänger-Chipsatz verwenden wie das u-blox-Board, das wir im Internetshop bei ArduSimple gekauft hatten.
Nicht in der Tabelle vermerkt ist, dass alle GNSS-Empfänger die Satellitensignale GPS, GLONASS, Galileo und BeiDou verarbeiten und diese mit RTK-Daten korrigieren können. John Deere, Reichhardt und Trimble betreiben für die Positionskorrektur ein eigenes RTK-Netz. Alternativ können deren Empfänger genauso wie die anderen Testkandidaten das RTK-Signal über den Korrekturdatendienst Sapos beziehen. Darüber hinaus bietet John Deere mit dem SF-RTK ein satellitenbasiertes RTK-ähnliches Korrektursignal an (Lizenzgebühr ab 500 Euro für drei Monate). Vorteil: Es sind in diesem Fall neben dem GNSS-Empfänger keine zusätzliche Hardware und keine Freischaltung für den Empfang eines mobilen RTK-Signals erforderlich. Auch mit dem u-blox-Chip D9S im Empfänger von Agra-GPS lässt sich ein RTK-ähnliches Signal per Satellit empfangen.
Modem für RTK
Das für den RTK-Empfang via Ntrip aus dem Internet notwendige Mobilfunkmodem ist beim CRG von Agra-GPS und beim All-in-One 4G von Satcon bereits im Empfänger eingebaut. Es handelt sich hier um ein Modem, das mit einer virtuellen SIM-Karte funktioniert.
Auch der u-blox-Empfänger ist optional mit einem solchen integrierten Modem bestellbar, bei ArduSimple kostest dieser dann 449 Euro. Hingegen muss bei den Empfängern von John Deere, Raven, Reichhardt und Trimble entweder ein optionales Modem integriert sein oder extern angeschlossen werden. Der Aufpreis dafür liegt bei 1 600 bis 2 085 Euro. Außerdem entstehen Kosten für eine SIM-Karte bzw. für die Freischaltung der Mobilfunknutzung.
Zudem gilt es beim John Deere-Empfänger StarFire 7500 zu beachten, dass die unbefristete Lizenz für das mobile RTK (z. B. Sapos) aktiviert ist (Aufpreis 4 350 Euro).
Während unseres Tests korrigierten alle Testkandidaten ihre GNSS-Positionsdaten mit dem Sapos-RTK. So waren die Bedingungen für alle gleich. Wie wir die Genauigkeit der Empfänger bei Geradeausfahrt und bei Kurvenfahrt sowie deren Verhalten bei Abschattung getestet haben, können Sie im Kasten „So haben wir getestet“ nachlesen.
Die Ergebnisse der Messungen haben wir in den Grafiken auf den folgenden Seiten dargestellt. Die sogenannten Box-Plots zeigen die Spanne der Messwerte, wobei die Boxen 50 % der Werte enthalten. Als Punkt eingezeichnet haben wir jeweils auch die mittlere Abweichung.
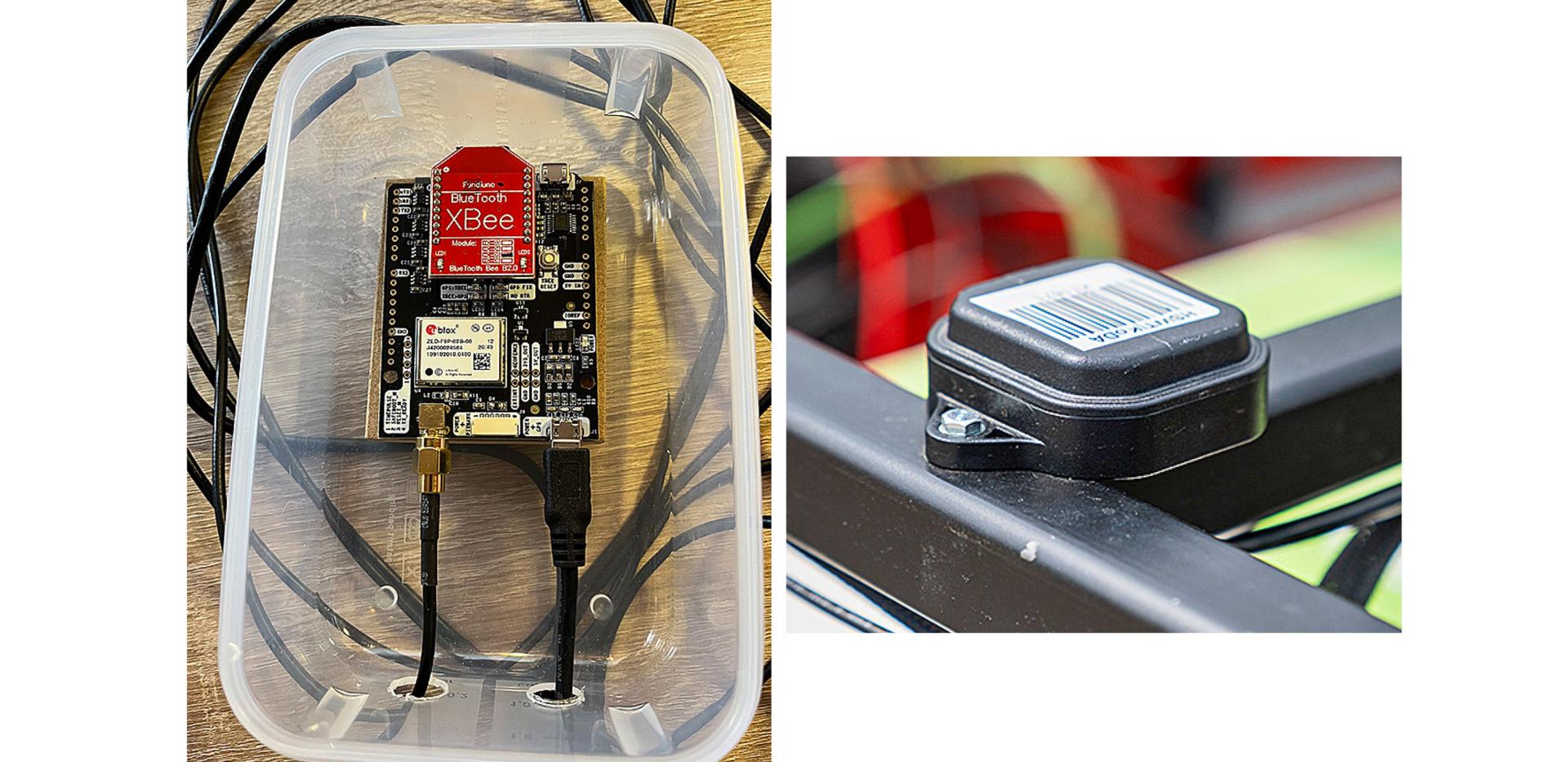
So haben wir getestet: Mit Seil und Kamera
Für den profi-Test montierten die Studierenden der HSWT die sieben Empfänger mit einem stabilen Rahmen auf der Roboterplattform Tipard 350 von digital workbench. Jede Antennenposition wurde genau eingemessen.
Die Hersteller hatten ihre Empfänger so konfiguriert, dass sie jede volle Sekunde einen NMEA-Datensatz mit Position, Zeit und Qualität (GGA), Geschwindigkeit und Richtung (VTG) sowie Datum und Zeit (RMC) ausgaben. So konnten die Informationen auf einem Laptop mitgeloggt und später ausgewertet werden.
Damit die Vergleichbarkeit gewahrt blieb, nutzten wir bei allen Testkandidaten den hochpräzisen Echtzeit-Positionierungs-Service (HEPS) von Sapos als Korrekturdatenquelle. Und eine weitere von uns geforderte Bedingung war, dass keiner der Testkandidaten während der Testfahrten die Positionsdaten mit Hilfe einer sogenannten IMU anpasst. Diejenigen, bei denen ein solches mit 3D-Sensorik ausgestattetes Elektronikbauteil im Empfänger integriert ist, mussten es abschalten.
Die Roboterplattform Tipard 350 kann GNSS-gelenkt autonom fahren, jedoch auch „nur“ mit RTK-Genauigkeit. Also liegt die mittlere Abweichung der tatsächlich gefahrenen Spur zur Sollspur wie bei den Testgeräten bei etwa +/- 2,5 cm. Deshalb bedurfte es einer Methode, die ausschließt, dass der Versatz des Tipards die Messergebnisse und damit die ermittelte Positionsgenauigkeit der Testgeräte beeinflusst.
Die Lösung war ein 2 cm dickes Hanfseil, das entlang einer 17 m langen Teststrecke gespannt wurde. Eine exakt mittig am Tipard angebrachte, senkrecht nach unten schauende 3D-Kamera filmte während der Testfahrten das Seil. Mittels Bildauswertung ließ sich so pixelgenau die Abweichungen der vom Tipard gefahrenen Spur zu der geraden Sollspur entlang der Seilmitte berechnen. Die theoretische Genauigkeit dieses Verfahrens liegt bei +/- 2 mm. Da hierbei der Fahrtrichtungswinkel des Tipard zur Fahrspur unberücksichtigt blieb, wurde ein Verfahrensfehler von +/- 1 cm unterstellt und die von den Empfängern ausgegebenen Punktkoordinaten entsprechend korrigiert.
Um das Verhalten der Empfänger bei Kurvenfahrt herauszufinden, wurde der Tipard mit Hebegurten an einem Laternenmast befestigt. So war er gezwungen, auf einer fixen Kreisbahn mit 7,40 m Radius zu fahren. Für den Test des Verhaltens bei Abschattung fuhr der Tipard mit den auf ihm montierten Testkandidaten zwischen zwei Gebäuden unter einer Brücke hindurch.
Die während der Geradeausfahrt aufgezeichneten Messwerte zur Spurgenauigkeit bestätigen, dass alle sieben getesteten GNSS-Empfänger mit der RTK-Korrektur über Sapos die von den Herstellern versprochene Präzision überwiegend erreichen. Bei einem Großteil der im Sekundentakt aufgezeichneten Messwerte von insgesamt 42 Messfahrten ergaben sich Abweichungen, die kleiner als 2 cm waren (siehe hierzu Boxen in der Grafik „Geradeausfahrt“). Die Fahrgeschwindigkeit hatte darauf keinen Einfluss.
Für die Auswertung der Spur-zu-Spur-Genauigkeit des Reichhardt RGS700 mussten wir auf die RMC-Positionsdaten in den NMEA-Nachrichten zurückgreifen — was eher unüblich ist. In der Regel nutzen GNSS-Empfänger die GGA-Daten für die Positionsbestimmung. Der Empfänger von Reichhardt gab bei unserem Test diese Daten allerdings nur mit vier Nachkommastellen aus. Das führt im schlimmsten Fall zu Positionsfehlern von rund 20 cm. Reichhardt hatte seinen Empfänger nicht korrekt konfiguriert. Normalerweise hätte er die GGA-Daten mit acht Nachkommastellen ausgeben sollen. Für die Praxis hätte die falsche Konfiguration Konsequenzen gehabt, weil externe Teilbreitenschaltungen die über ein serielles Kabel übertragenen Positionen aus der GGA-Nachricht nehmen. Für das herstellereigene Lenksystem nutzt Reichhardt die RMC-Daten. Ein Konfigurationsfehler bei den GGA-Datenausgabe würde hier daher nicht auffallen.
Kurve ohne Beanstandung
Bei der Kurvenfahrt nahm die Streuung der Abweichung im Vergleich zu den Werten bei der Geradeausfahrt zu. Die Genauigkeit litt darunter aber nur wenig. So lagen 50 % der Messwerte von insgesamt 54 Messfahrten auf der Kreisbahn zwischen -1,8 und +1,1 cm und damit im Toleranzbereich. Wesentliche Unterschiede zwischen den getesteten Empfängern gab es nicht. Aber eine höhere Fahrgeschwindigkeit verschlechterte hier die Genauigkeit der Positionsbestimmung. Dies liegt mutmaßlich an den ruckartigen Bewegungen, die das auf eine Kreisbahn gezwungene Trägerfahrzeug ausführte.
Bei der dritten Testaufgabe ging es um die Stabilität der Positionsbestimmung während einer Abschattung, z. B. durch Bäume am Feldrand oder wie bei unseren Testfahrten zwischen zwei Gebäuden unter einer Brücke. Eins dazu gleich vorweg: Die Signalabschirmung wirkte sich auf alle Testkandidaten aus. Dabei gab es keine erheblichen Unterschiede zwischen den Empfängern, und alle konnten die Positionsbestimmung in guter Qualität halten.
Als Parameter für die Beurteilung zogen wir die Anzahl empfangener Satelliten, den HDOP-Wert und den RTK-Status heran. Zusätzlich betrachteten wir die von den GNSS-Empfängern ermittelten Fahrgeschwindigkeiten sowie die Fahrtrichtungssignale. Denn eine genaue Geschwindigkeitsmessung ist insbesondere für das Section Control wichtig.
Positiv können wir vermerken, dass alle getesteten Empfänger bei den insgesamt 30 Testfahrten unter der Brücke ähnliche Geschwindigkeiten mit durchschnittlich 4 km/h aufzeichneten. Auch die Streuung um diesen mittleren Wert war gering.
Genauso verhielt es sich bei den Fahrtrichtungswerten. Mit einer einzigen Ausnahme gaben alle Empfänger relativ ähnliche und stabile Gradangaben aus. Bei dem getesteten Satcon-Empfänger war vermutlich eine fehlerhafte Einstellung verantwortlich für die teilweise recht hohen Abweichungen von der eigentlichen Richtung. Für diese Annahme spricht, dass auch bei der Geradeausfahrt auf offener Fläche hohe Richtungsabweichungen auftraten — und das, obwohl im Satcon All-in-One 4G der gleiche Empfänger-Chipsatz verbaut ist wie im parallel eingesetzten Empfänger von ArduSimple. Letzterer gab die Fahrtrichtung korrekt aus.
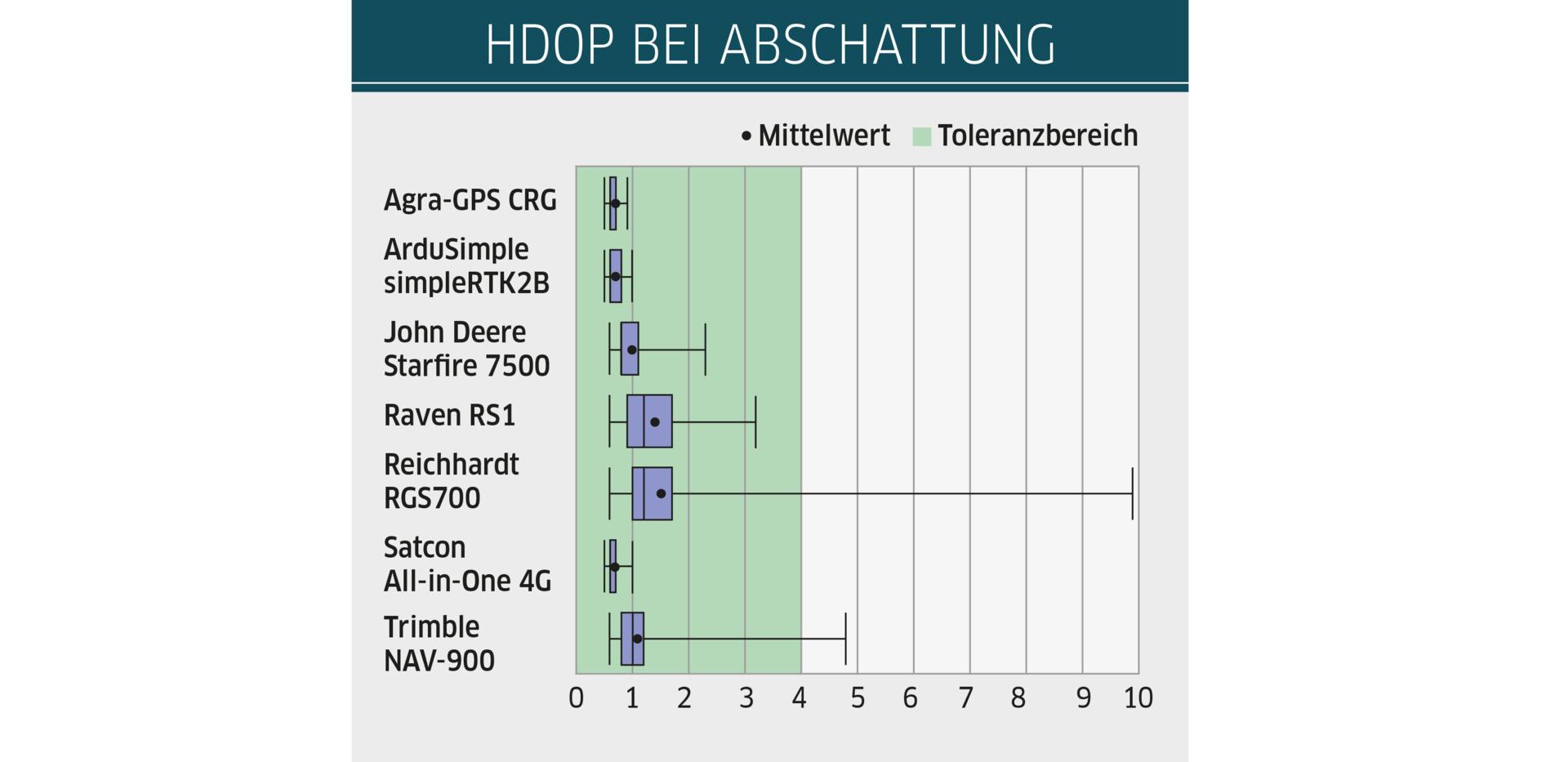
Als Maß für die Güte der Satellitenanordnung dient der HDOP. Je kleiner der Wert, desto besser. Sehr gut bis gut sind HDOP-Werte kleiner 2. Aber auch etwas höhere Werte bis maximal 4 beeinflussen erfahrungsgemäß die Genauigkeit der Positionsbestimmung für das automatische Lenken oder das Section Control kaum. Wie in der Grafik „HDOP bei Abschattung“ zu sehen, lagen 75 % der HDOP-Werte bei allen Testkandidaten unter einem Wert von 2. Bei den Empfängern mit F9P-Chipsatz (Agra-GPS, ArduSimple, Satcon) stieg der HDOP nicht über 1 — sehr gut. Und selbst wenn der Reichhardt RGS700 hier die größte Streuung zeigte, so blieben doch 97 % unter der kritischen Grenze mit einem HDOP kleiner 4.
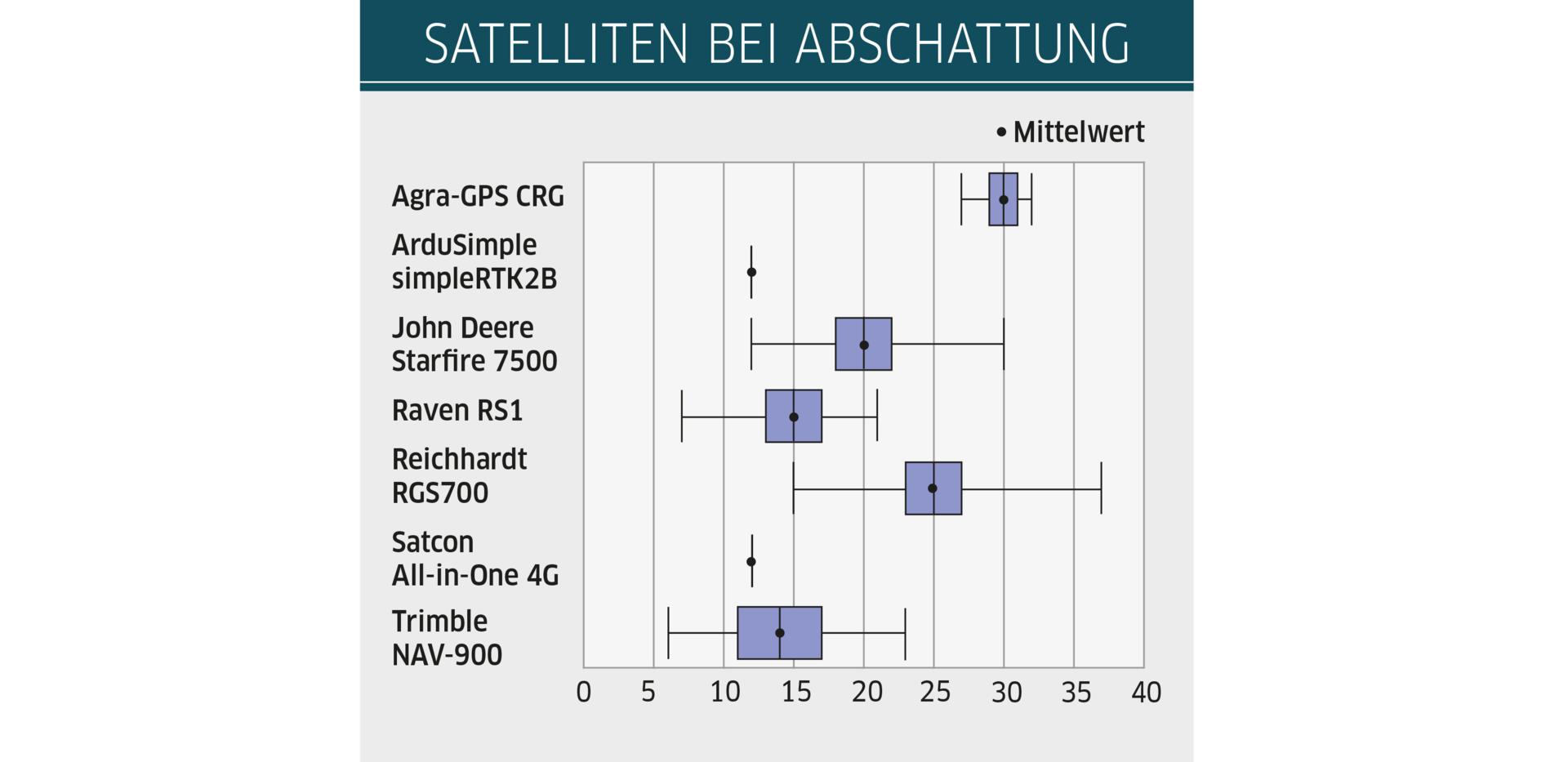
Da GNSS-Empfänger ihre Position aus der Trilateration der Satellitensignale berechnen, könnte man meinen, dass die Positionsgenauigkeit mit der Anzahl der Satelliten zunimmt. Dem ist aber nicht unbedingt so. Denn es kann zu Fehlern bei der Positionsbestimmung kommen, wenn die Signale von Satelliten einbezogen werden, die tief am Horizont stehen. Spannend ist daher, dass der Satcon All-in-One 4G und der u-blox-Empfänger von ArduSimple die Anzahl der empfangenen Satelliten beim Durchfahren der Abschattung konstant bei 12 hielten. Die Hersteller zogen es vor, nur die Signale der besten Satelliten zu nutzen. Andere verwendeten hingegen möglichst viele Satelliten. Bei diesen Testkandidaten änderte sich die Anzahl in der Abschattung (Grafik „Satelliten bei Abschattung“).
Nur im Status RTK fix können GNSS-Empfänger eine Genauigkeit im Zentimeterbereich erreichen. Befinden sie sich im Status RTK float, wird die RTK-basierte Korrektur zwar angewendet. Aber die absolute Genauigkeit liegt nur im Dezimeterbereich, weil die für eine hohe Genauigkeit nötige Phasenkorrektur der GNSS-Signale fehlt.
Im Status DGPS verarbeiten die Empfänger kein RTK-Signal, sondern greifen auf eine satelliten-basierte Korrektur z. B. über Egnos oder bei John Deere auf das kostenlose SF1-Korrektur zurück. Die Spur-zu-Spur-Genauigkeit dieser dritten Stufe ist geringer, weil nur die Laufzeit der GNSS-Signale korrigiert wird.
Deswegen war es bei unseren Abschattungstestfahrten interessant zu sehen, ob und wie lange die Empfänger den Status RTK fix halten. Denn je nachdem, wie lange ein RTK-Verlust andauert, und je nach Anwendungsfall könnte ein Verlust des Status RTK fix nicht nur zu verminderter Arbeitsqualität, sondern unter Umständen gar zu einem Stillstand der Maschine führen (z. B. bei vollständig autonom arbeitenden Feldrobotern).
Bei unseren Messfahrten verloren einige Empfänger in der Abschattung kurzfristig den Status RTK fix. Während die Empfänger von Agra-GPS und Satcon rund 10 % der Zeit im RTK float-Status liefen, wechselte der John Deere StarFire 7500 in den Status DGPS. Der Reichhardt RGS700 und der Raven RS1 verloren den Status RTK fix nicht. Allerdings lieferte der Raven-Empfänger zeitweise keine Daten. Eine Erklärung hierfür haben wir nicht.
Fazit
In unserem Test zeigten die sieben untersuchten GNSS-Empfänger keine wesentlichen Unterschiede in Bezug auf die durchschnittliche Präzision und Zuverlässigkeit bei der Positionsbestimmung — weder bei Geradeaus- noch bei Kurvenfahrt. Auch in der von uns vorsätzlich erzeugten Abschattungssituation liefen alle Testkandidaten mit ausreichender Genauigkeit weiter.
Das bedeutet: Auch ein kostengünstiger GNSS-Empfänger kann ein guter sein. Aber gleichzeitig gilt, ein guter Empfänger in einem insgesamt schlecht konfigurierten Lenksystem kann dessen Leistung nicht verbessern. Denn der GNSS-Empfänger ist zwar die essenzielle Grundlage für die Genauigkeit der darauf aufbauenden Systeme. Jedoch müssen alle Komponenten gut zusammenarbeiten.
Die Co-Autoren
profi organisierte den Vergleichstest von RTK-GNSS-Empfängern. Die Hochschule Weihenstephan-Triesdorf (HSWT) führte ihn am Kompetenzzentrum für Digitale Agrarwirtschaft (KoDA) durch und wertete die Ergebnisse aus. Vorab entwickelte eine Arbeitsgruppe mit Studierenden und wissenschaftlichen Mitarbeiterinnen und Mitarbeitern unter Leitung von Prof. Dr. Patrick Noack die Testmethoden. Mit-Autoren des Beitrags sind Patrick Noack, Margret Frischhut, Lea Obermaier, Magnus Hoffmann, Ruben Berger und Moritz Heidelbeer. Dank gilt auch Peter Hopf, Alex Wabro und Sascha Fast, die das Team beim Test unterstützten.