Combined Powers VTE von Lemken und Krone: Gemeinsam unabhängig
Lemken und Krone entwickeln zusammen ein autonomes Trägerfahrzeug. Wir haben uns die VTE im Einsatz beim Mähen, Wenden, Grubbern und Drillen angesehen.
Stoisch mäht die Verfahrenstechnische Einheit (VTE) auf einer Grünlandfläche ihre Bahnen — ganz ohne Zutun eines Menschen. Rund zwei Jahre intensive Entwicklungsarbeit stecken in dem autonomen Zugfahrzeug, gestemmt als Gemeinschaftsprojekt von Krone und Lemken.
(Quelle: Redaktion profi)
In der Diskussion um autonome Lösungen war Treiber dieser Entwicklung nach Aussage beider Unternehmen der Wunsch nach einem stärkeren Fokus auf das Arbeitsergebnis. Sowohl Lemken als auch Krone haben ihren Schwerpunkt in der Fertigung von Anbaugeräten, entsprechend anders fällt die Sichtweise auf das Zugfahrzeug aus.
Mit der nun vorgestellten VTE, die das autonome Fahren beherrscht, ist die Entwicklung deshalb nicht beendet. Vielmehr zeigen auch die eingesetzten Geräte bereits Ansätze, mit Sensortechnik das Arbeitsergebnis zu kontrollieren und zu optimieren. Hier wird sich in Zukunft wohl noch einiges tun.
Combined Powers VTE von Lemken und Krone: Zugmaschine mit 230 PS
Doch zunächst zum neuen Fahrzeugkonzept. Angetrieben wird die VTE von einem MTU Vierzylinder-Diesel mit 170 kW/230 PS. Dieser erzeugt über einen Generator Strom für drei Elektromotoren. Diese Hauptmotoren treiben Hinterachse, Vorderachse und Zapfwelle an. Der E-Antrieb erlaubt zum einen eine einfache Regelbarkeit der unterschiedlichen Funktionen. Zum anderen ist das Konzept damit nicht auf die Energiequelle Dieselmotor festgelegt. Zukünftig könnten auch andere Energieträger und Antriebskonzepte zum Einsatz kommen, wenn sie die nötigen Leistungen liefern können.
Was das Fahrwerk angeht, ist die VTE mit zwei gelenkten Achsen und Reifen der Dimension 650/65 R 38 unterwegs. Die Lenkungsarten Vorderrad-, Hinterrad- und Allradlenkung sind möglich. Die Entwickler
setzen bewusst auf den Radantrieb: Gegenüber Raupenlaufwerken ist der Grünlandeinsatz nicht eingeschränkt. Außerdem sind Traktionsprobleme in diesem Leistungsbereich kaum zu erwarten.
Ein klassisches „vorne“ und „hinten“ gibt es bei der VTE durch Hubwerk und Motorhaube zwar. Ohne Kabine und Fahrersitz sind Hauptfahrt- und Arbeitsrichtung aber nicht festgelegt. Der Einsatz ist sowohl im Schub- als auch Zugbetrieb möglich.
Aktuell ist das Fahrzeug mit nur einem Hubwerk und 10 t Hubkraft unterwegs. Auf Dauer sind weitere Anbauräume, etwa ein Fronthubwerk denkbar. Die Ausführung entspricht dem Kat. III-Standard, somit lassen sich alle gängigen Anbaugeräte — auch anderer Hersteller — anbauen. Lediglich die Stabilisatoren befinden sich innen, um für die Allradlenkung an den Seiten Platz zu schaffen. Die Hydraulikpumpe mit 110 l /min wird per Nebenabtrieb angetrieben und liefert an aktuell vier doppeltwirkende Steuergeräte. Ebenfalls stehen auch Power Beyond-Anschlüsse zur Verfügung.
Eine weitere Schnittstelle zum Anbaugerät ist die ISO-Bus-Steckdose. So realisieren Krone und Lemken die Gerätebedienung bzw. den Datenaustausch zwischen VTE und Anbaugerät. Bei der VTE zeigt sich das neben der Steckdose auch durch ein CCI 1200 Terminal, das sich seitlich hinter einer Klappe verbirgt. Aktuell können darüber Gerätefunktionen angesteuert werden, etwa um den Abdrehprozess bei einer Drillmaschine zu starten und die Ergebnisse einzugeben. Hier wird es vermutlich im Zuge der weiteren Entwicklung vielleicht noch zu einer tieferen Integration in die App kommen, mit der die Einsatzplanung der VTE erfolgt.
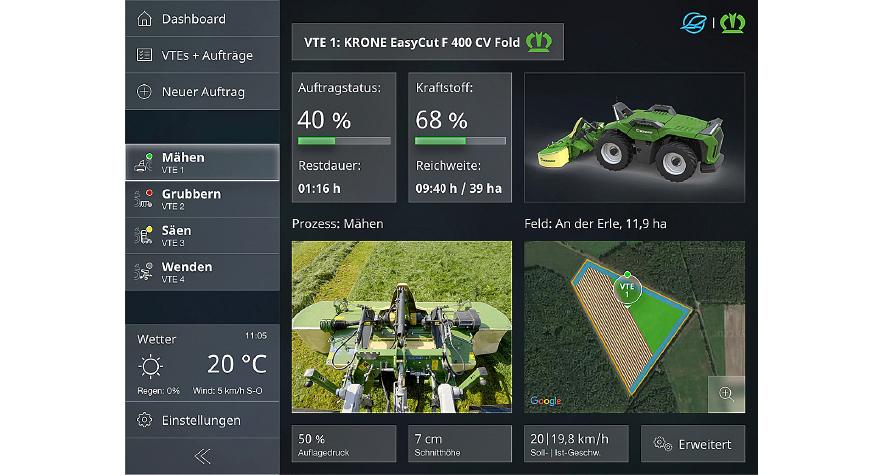
Diese App ist in der Lage, die Aufträge gleich mehrerer Einheiten zu verwalten. Neben den typischen Daten wie Art der Arbeit und Fläche ist dabei vor allem das Modul zur Spurplanung interessant. Es erlaubt eine detaillierte Planung der Fahrspuren, die dann vom VTE autonom abgearbeitet werden. Dabei kann der Anwender zum Beispiel auch definieren, ob das Vorgewende zuerst oder zuletzt bearbeitet werden soll. Beim Mähen ist ein „wildfreundliches“ Arbeiten von innen nach außen möglich.
Bei der Arbeit selbst dokumentiert die VTE Einsatz, Fahrspuren und Maschinendaten, etwa zu Ausbringmengen. Der Datenaustausch erfolgt mit Hilfe des agrirouter. Über die App kann der Nutzer jederzeit den Arbeitsfortschritt einsehen. Kameras an allen Seiten der VTE erlauben außerdem einen Blick auf die Arbeit nahezu in Echtzeit.
Die unmittelbare Kontrolle über die autonome Maschine kann der Nutzer mit einer Funkfernbedienung übernehmen. Sie ist für das Anbauen von Geräten, kurze Fahrten zur nächsten Fläche oder das Verladen auf einen Tieflader gedacht. Neben Fahrtrichtung und Geschwindigkeit lassen sich alle wesentlichen Funktionen von Hydraulik über Hubwerk bis hin zur Zapfwelle ansteuern. Der Anbau eines Gerätes gelingt dabei geübten Nutzern genau so schnell, wie bei einem Traktor mit Kabine.
Während der Arbeit überwacht die VTE das Umfeld kontinuierlich. Dazu kommen sowohl Kameras als auch Lidar- und Radar-Sensoren zum Einsatz. Taucht unerwartet ein Hindernis auf, stoppt das Fahrzeug und informiert den Nutzer über die App. Dieser muss dann das Umfeld kontrollieren und das Fahrzeug wieder starten. Technisch funktioniert dieser Vorgang schon zuverlässig. Eine in der Fläche platzierte Puppe wurde bei unserem Testeinsatz erkannt.
In der Praxis gibt es aber noch einige offene Fragen. Reicht es zum Beispiel aus, wenn der Anwender per Kamera einen Rundumblick auf die Situation wirft, oder muss er vor Ort sein? Auf die Dauer wäre es sicher auch hilfreich, wenn sich der Umfelderkennung eine automatische Analyse der Situation anschließt. So könnte etwa flüchtendes Wild erkannt werden und die Einheit selbstständig wieder starten.
Nach Angaben von Lemken und Krone fehlen für solche Fragestellungen noch die gesetzlichen Rahmenbedingungen. Eine EU-Verordnung, die das Thema Robotik und autonome Technik sehr weit fasst, liegt zwar im Entwurf vor, bis zur Verabschiedung kann es allerdings noch dauern.
Ähnlich verhält es sich mit der Fahrt zur nächsten Fläche. Aktuell kann das Umsetzen der VTE nur bei arrondierten Betrieben auf eigener Achse erfolgen. Geht es über öffentliche Straßen, ist das Verladen auf ein zugelassenes Transportfahrzeug nötig. Aus dem Aufwand lässt sich eine Mindesteinsatzzeit pro Fläche ableiten. Laut Lemken und Krone liegt diese bei etwa fünf Stunden pro Fläche. Mit dem Mähwerk mäht die VTE bis zu 6 ha pro Stunde, damit liegt die nötige Flächengröße bei 30 ha. Unterstellt man bei der Einzelkornsaat 2 ha pro Stunde, sind es immer noch 10 ha minimale Flächengröße.
„Die VTE verrichtet ihre Arbeit autonom“ — aktuell stimmt das nur zum Teil und dessen sind sich die Entwickler auch bewusst. Denn unabhängig Fahren ist das eine, eine gute Arbeitsqualität ist damit aber noch nicht sichergestellt. In Zukunft wollen Lemken und Krone den Fokus weiter stark auf das Arbeitsergebnis richten.
Sensoren an der VTE aber auch an den Anbaugeräten liefern dafür die Grundlage. Die Analyse von Kamerabildern kann zum Beispiel Aufschluss über das Arbeitsbild geben. Wird es ungleichmäßig, liegt etwas im Argen. Die Herausforderung für die Entwickler ist die Erstellung eines geschlossenen Regelkreislaufs. Die Sensoren erkennen einen Zustand, daraus ergibt sich eine neue Einstellung mit wiederum einem neuen Sensorergebnis.
Viele für einen Fahrer banale Mechanismen müssen die Entwickler zuerst erkennen und abwägen, ob eine Nachbildung dieser „Funktion“ mit Hard- und Software möglich ist. Die Definition des idealen Arbeitsergebnisses wird wohl beim Anwender bleiben. Den Weg dahin muss die Maschine im Idealfall selbst finden.
Mit der VTE haben Lemken und Krone innerhalb sehr kurzer Zeit eine autonome Arbeitsmaschine in den Einsatz gebracht. Kernthemen wie Spurplanung und Umfelderkennung funktionieren. Für die beiden Unternehmen steht darüber hinaus die Optimierung des Arbeitsergebnisses im Vordergrund. In den nächsten Jahren wollen die Entwickler weitere Prototypen in den Einsatz bringen, um Erfahrungen aus der Praxis sammeln. Parallel wird die Entwicklung sowohl der VTE als auch der Sensortechnik rund um Zugfahrzeug und Anbaugeräte weitergehen.
Aus den Gesprächen mit den Entwicklern
„Unsere Geräte können sehr viel mehr, wenn sie mit der Zugmaschine zusammenarbeiten. Seit 2011 diskutieren wir dazu mit den Traktorherstellern über TIM und den Zugriff auf das Hubwerk — ohne nennenswerte Fortschritte.“
– „Wetterbeobachtung, Hören, Sehen, Ausweichen: Der Fahrer leistet viel — das zu ersetzten ist in einem autonomen Prozess eine große Herausforderung.“
– „Wir müssen uns genau ansehen, wo wir redundante Systeme brauchen. Fällt zum Beispiel der Leermelder im Tank aus, sollte die Maschine trotzdem nicht unbegrenzt weiter säen.“
– „Aktuell fehlt noch ein klarer rechtlicher Rahmen für den autonomen Einsatz. Andere Länder, speziell in Nordamerika, sind da schon weiter.“
– „In den nächsten Jahren sammeln wir vor allem Erfahrungen mit der Hard- und Software. Wir hoffen auf möglichst viele Rückmeldungen aus der Praxis zu diesem Konzept.“