Autonome Lösungen für Sonderkulturen und einzelne Pflanzenschutzanwendungen setzen sich intensiv mit dem Arbeitsprozess auseinander. Bei der Bodenbearbeitung und Aussaat steht dagegen aktuell das autonome Zugfahrzeug im Vordergrund.
Dabei ist dieser Punkt gelöst. Lenksysteme steuern die Maschinen über den Acker und Sensorik für die Hinderniserkennung ist verfügbar. Das eigentliche Fahren ist aber nur ein Baustein im autonomen Prozess.
Fahrerersatz?
Noch weitgehend offen ist die Kontrolle und Optimierung der Arbeitsprozesse Bodenbearbeitung, Aussaat, Pflanzenschutz und Düngung. Neben der Umfeldüberwachung und Überführung des Arbeitsgeräts auf die nächste Fläche ist dies aktuell die wesentliche Aufgabe des Fahrers. Das kann beim Grubbern der Langstrohrest sein, der sich in die Maschine setzt, oder die Anpassung der Fahrgeschwindigkeit, um das Arbeitsergebnis zu verbessern. Beim Säen kann es die Andruckrolle sein, die sich verabschiedet hat, oder die Erhaltung bzw. Anpassung der Saattiefe.
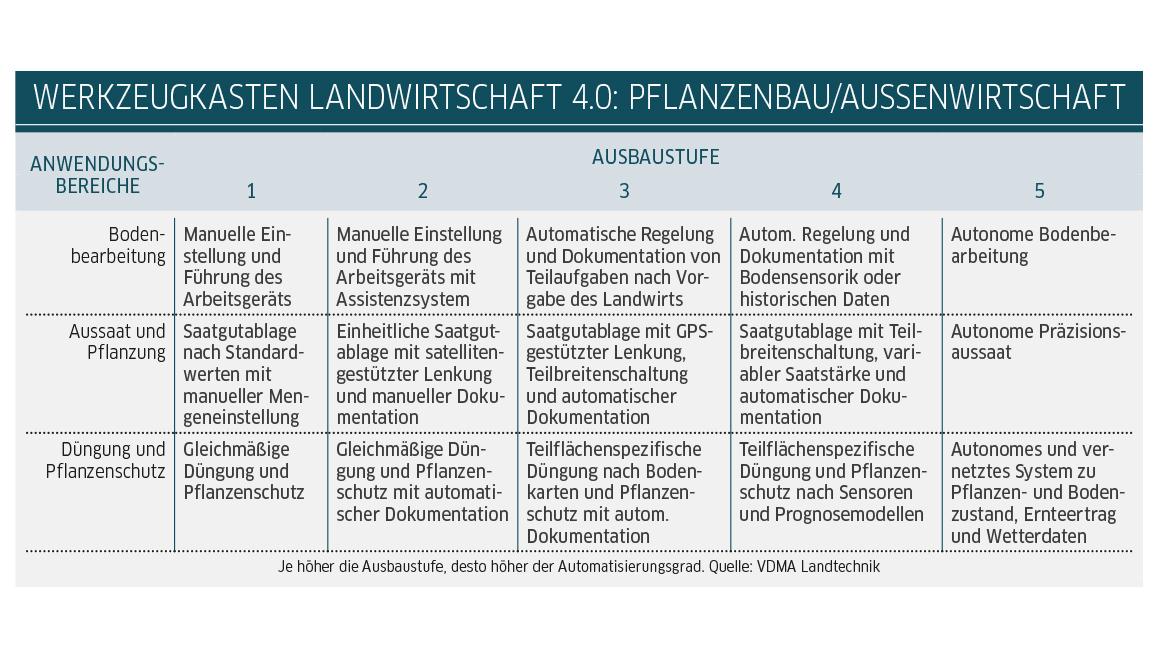
Wirft man einen Blick auf die verschiedenen Ausbaustufen der Digitalisierung/Automatisierung in der Tabelle auf dieser Seite wird klar, dass gerade Arbeiten wie Bodenbearbeitung und Aussaat auf der Skala der Ausbaustufe noch recht weit unten stehen. In den nächsten Stufen wird es also darum gehen müssen, die Aufgaben des Fahrers in diesen Sektoren Schritt für Schritt auf die Maschine zu übertragen. Dabei muss die Elektronik nicht besser werden als der beste Maschinenoptimierer. Sie sollte aber Ergebnisse auf gutem Niveau erreichen.
Düngung und Pflanzenschutz sind schon weiter auf der Automatisierungs-Skala. Hier könnte in konventionellen Verfahren das Ende der Fahnenstange in Richtung Autonomie zunächst erreicht sein. Beim klassischen Pflanzenschutz mit hoher Flächenleistung ist die Fehlertoleranz gering und das Ertrags- und Umweltrisiko hoch. Ähnliches gilt für die Düngung. Damit ist unwahrscheinlich, dass hier schnell die nächsten Schritte in Richtung Automatisierung kommen.
Die Fehlertoleranz bei Bodenbearbeitung und Aussaat kann höher sein, gleichzeitig bindet die geringere Flächenleistung knappe Arbeitskräfte länger — das könnte Treiber der Entwicklung werden. Der nächste Schritt in Richtung Automatisierung und Digitalisierung bei Bodenbearbeitung und Aussaat wäre klassisch ein Dialogsystem. Es setzt nach wie vor auf den Fahrer, bietet ihm aber eine fundierte Unterstützung bei der Maschineneinstellung. Dazu fragt es Ziele ab, die z. B. von möglichst ökonomisch bis hin zu ackerbaulich optimal variieren können. Schrittweise wird der Fahrer durch konkrete Einstellhinweise geführt — quasi eine digitale Bedienungsanleitung.
Auch die Bewertung des Ergebnisses gehört zu diesem Ablauf. Während zum Beispiel der Kraftstoffverbrauch eine objektive Kennzahl liefert, ist die Krümelung des Bodens schwerer zu bewerten und unterliegt zumindest teilweise der subjektiven Bewertung. Diese Bewertung gibt er an das Dialogsystem zurück. Die Frage: Passen Verbrauch (Input) und Ergebnis (Output) zusammen, beantworten auf dieser Stufe Fahrer und Assistenzsystem gemeinsam.
Eine Grundlage für die weitere Automatisierung sind stabile Prozesse. Einflussgrößen, die sich vermeiden lassen, müssen eliminiert werden. Wenn z. B. die Scherschrauben der Grubberzinken zu schwach sind und ständig brechen, sind unnötige Arbeitsunterbrechungen die Folge — der Anwender muss eingreifen. Autonome Maschinen arbeiten also vermutlich ohne Scherschrauben. Das Beispiel Langstroh zeigt die Bedeutung der gesamten Prozesskette. Hat die Presse die Fläche nicht sauber geräumt, kann sich das auf die weiteren Arbeiten auswirken und gefährdet die Prozessstabilität.
Auch Unterschiede zwischen den Verfahren kommen ins Spiel. Um beim Stroh-Beispiel zu bleiben: Eine Kurzscheibenegge ist weniger anfällig für Haufenbildung und Verstopfung als ein Grubber. Es ist also wahrscheinlich, dass sich mit der Automatisierung die Arbeitsgeräte weiter verändern.
Ein stabiler Arbeitsprozess entlastet den Fahrer, jedoch kann damit auch die Aufmerksamkeit zurückgehen. Aus der Automobil-Branche ist das Problem bekannt: Ist der Fahrer nicht mehr voll eingebunden, reduziert sich das Situationsbewusstsein. Das kann dazu führen, dass er z. B. Störungen oder Notsituationen verspätet wahrnimmt.
Um dem Fahrer noch mehr Kontrollaufgaben abzunehmen, kann mehr Sensortechnik in der Maschine notwendig sein — auch zur Bewertung des Ergebnisses. Erste Lösungen auch für die Bodenbearbeitung befassen sich mit der genauen Einstellung. So lässt sich die Arbeitstiefe beim Grubbern schon bei einigen Herstellern digital ablesen bzw. einstellen, auch die teilflächenspezifische Einstellung der Arbeitstiefe ist verfügbar.
Bei der Sätechnik gibt es Systeme zur Kontrolle des Saatgutflusses. Einzelkorndrilltechnik wird schon lange überwacht. Bei der Ablagetiefenanzeige und -einstellung gibt es hier auch noch Potenzial. Auch der Schardruck gehört als Einflussgröße auf die Digitalisierungs-Liste.
Komplizierter wird es bei den Themen Erdstrom in der Maschine und Verstopfungen. Hier sind verschiedene Lösungen denkbar. So könnte zum Beispiel ein Abgleich der Walzenumdrehungen mit den Radumdrehungen der Stützräder Aufschluss darüber geben, ob die Walze einen Erdwall vor sich herschiebt.
Die Messung der Zugkraft an der Deichsel gibt Hinweise auf Verstopfungen oder fehlende Werkzeuge. Die Interpretation durch die Steuerung ist hier aber schon schwieriger. Denkbar wäre zum Beispiel ein Abgleich mit der vorangegangenen Arbeitsspur. War dort der Zugkraftbedarf zum Beispiel ebenfalls erhöht, ist ein Einfluss des Bodens wahrscheinlich. War er es nicht, könnte etwas mit der Maschine oder dem Prozess nicht stimmen.
Auch Kamerasysteme mit automatischer Bildauswertung könnten eine Lösung sein. Sowohl für den Gutfluss in der Maschine als auch für die Bewertung des Ergebnisses. Eine Kamera, die hinter die Maschine blickt, könnte aus dem Arbeitsbild sowohl Rückschlüsse auf das Arbeitsergebnis als auch auf den Erdfluss ziehen.
Mehr Sensortechnik macht noch keine autonome Arbeit. Dafür braucht es geschlossene Regelkreisläufe. Wird z. B. ein stockender Erdfluss in der Maschine erkannt, muss der Bordcomputer automatisch Maßnahmen einleiten und etwa das Gerät oder bestimmte Werkzeuge ausheben. In der Dokumentation der Arbeit kann eine standortbezogene Kennzeichnung der Fehlerstelle erfolgen. Führen die Maßnahmen nicht zum Beseitigen der Störung, sollte die Maschine stoppen und eine Meldung absetzen.
Nur mit solchen geschlossenen Regelkreisen ist die Arbeit wirklich autonom. Bis es so weit ist, wird es vermutlich Zwischenschritte geben, in denen der Mensch nicht mehr 1:1 mit einer Maschine unterwegs ist. Vielmehr kontrolliert er engmaschig eine oder mehrere autonome Einheiten und übernimmt die Versorgung mit Saatgut und Treibstoff sowie die Wartung.
Um möglichst passende Eingangs- und Stellgrößen für solche Regelkreise zur Verfügung zu haben, wird das Zusammenspiel zwischen Zugmaschine und Gerät immer wichtiger. Faktoren wie Geschwindigkeit, Schlupf oder Zapfwellendrehzahl können für die Regelung des Prozesses eine wichtige Rolle spielen.
Das Traktor-Anbaugeräte-Management wird also über die Fahrerentlastung hinaus auch bei autonomen Maschinen seine Bedeutung behalten. Damit bleiben auch die Ansprüche an möglichst normierte Schnittstellen erhalten. Der ISO-Bus und speziell TIM (Tractor Implement Management) sind Grundlagen für das autonome Arbeiten.
Viele Hersteller von Anbaugeräten beschäftigen sich mit dem Thema „autonomes Arbeiten“ und setzten beim Zugfahrzeug teilweise auf eigene Lösungen:
Lemken und Krone präsentierten im April 2022 das Konzept Combined Powers mit selbst entwickeltem autonomem Fahrzeug (profi 7/2022). Der Schwerpunkt liegt auf dem Arbeitsergebnis, Kameras und Sensoren überwachen den Arbeitsprozess.
Horsch hat den RO 1 vorgestellt (profi 3/2022), eine Konzeptstudie mit 350 Diesel-PS. Daneben arbeitet der Hersteller an weiteren autonomen Lösungen.
„Wir stehen bereit, unsere Geräte weiter in Richtung autonomer Einsätze zu entwickeln, einen Traktor-Ersatz haben wir aber nicht im Sinn“, so Stefan Kiefer, Leiter Pflanzenbauinnovationen bei Amazone.
Burkhard Sagemüller, Entwicklungsleiter bei Lemken, sieht auf Dauer auch andere Maschinenkonzepte: „Aktuell gilt es, die Arbeitszeit des Fahrers effektiv zu nutzen, z. B. mit der Drillkombination. In einer autonomen Welt könnten die Prozessschritte Saatbettbereitung und Aussaat wieder zu trennen sein, wenn das vorteilhaft ist.“
Köckerling hat bereits erste Projekte zur teilflächenspezifischen Tiefenführung umgesetzt. Aktuell ist das Thema Automatisierung in Gesprächen mit den Kunden zwar Thema, die Nachfrage aber verhalten. „Mit fortschreitender Autonomie der Zugfahrzeuge werden smarte Anbaugeräte erforderlich. Roboter benötigen Maschinen mit passender Arbeitsbreite und Sensorik, damit die Einsatzsicherheit nicht gefährdet wird“, so Stefan Kröger, Marketingleiter bei Köckerling.
Bei Pöttinger sieht man aktuell bereits eine steigende Nachfrage nach Sensorik auch in der Bodenbearbeitung. „Betriebsleiter wollen das Arbeitsergebnis kontrollieren und fordern zum Beispiel Systeme zur Einhaltung der Arbeitstiefe. Daraus werden sich weitere Automatisierungsschritte ergeben“, so Stephan Ackermann, Leiter Produktmanagement bei Pöttinger. Die Futterernte mit kurzen Zeitfenstern und hohem Straßenanteil sieht das Unternehmen aktuell nicht im Fokus der Automatisierung.
Speziell bei der Bodenbearbeitung und Aussaat bietet die weitere Automatisierung Potenzial und kann den Fahrer mittelfristig ersetzen. Stabile Arbeitsprozesse schaffen die Grundlage dafür, Sensortechnik muss Kontrollaufgaben übernehmen und auch das Arbeitsergebnis bewerten können.
Arbeiten mit hoher Flächenleistung und geringer Fehlertoleranz wie z. B. Düngung und konventioneller Pflanzenschutz entwickeln sich in Richtung Fahrerunterstützung weiter, stehen bei der Automatisierung aber nicht vorne an. Die Hersteller der Anbaugeräte wollen überwiegend keine eigenen Fahrzeuge entwickeln, sondern ihre Geräte an neue Anforderungen anpassen.