AgXeed AgBot mit Amazone-Geräten: Robotersaat mit Front-Heck-Kombi
Amazone will dabei sein, wenn Roboter Arbeiten im Feld übernehmen. Bei der Einzelkornsaat in Kombination mit Fronttank und Kreiselgrubber musste der AgBot jetzt zeigen, was er kann.
Fachlich versierte und an digitaler Technik interessierte Fahrer sind rar. Ein Grund auch für Geräte-Hersteller wie Amazone über Konzepte mit Feldrobotern nachzudenken.
AgXeed AgBot mit Amazone-Geräten
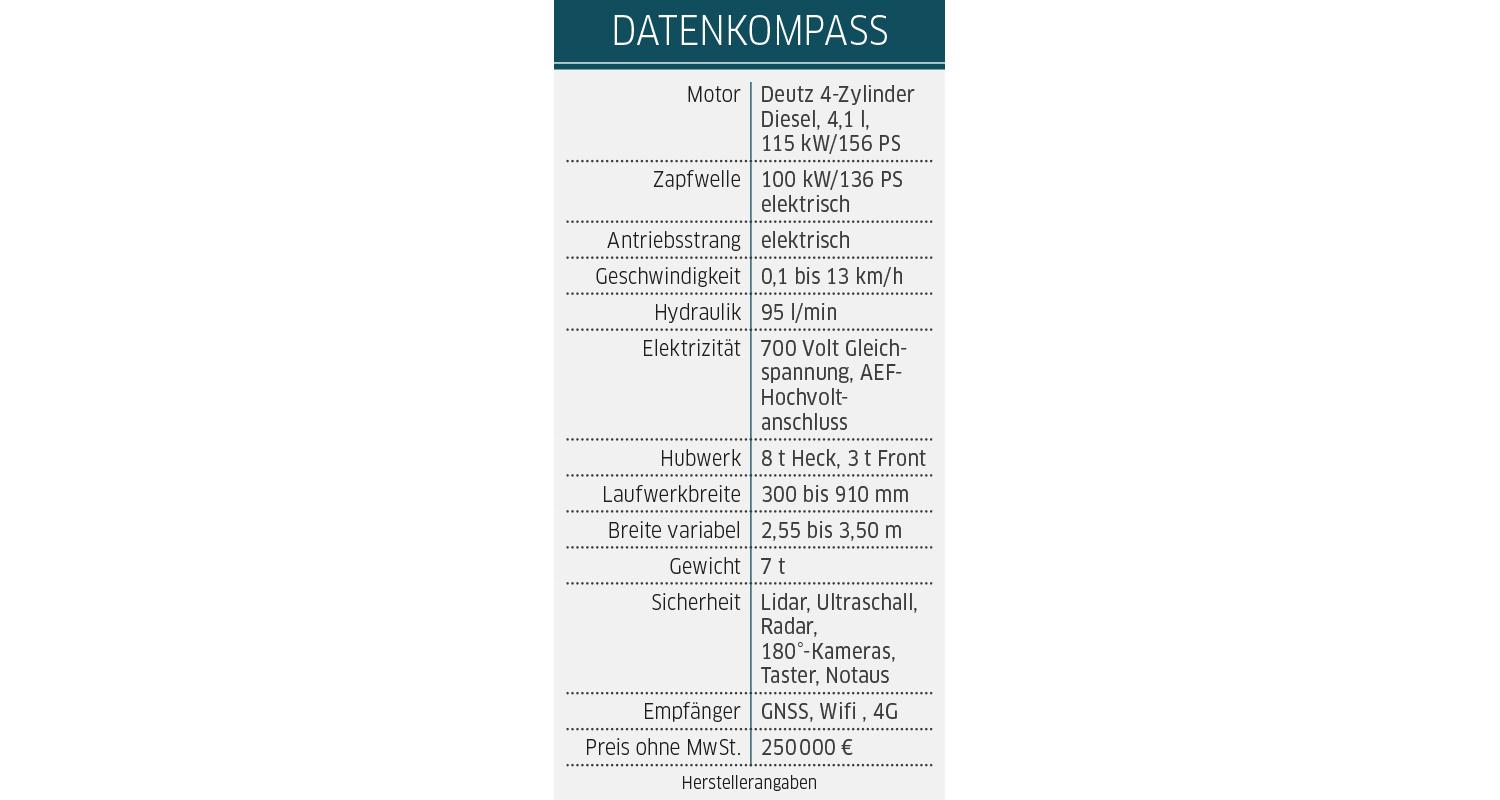
Der AgBot vom niederländischen Start-up AgXeed ist ein Raupentraktor ohne Fahrerkabine, der laut Hersteller alles kann, was ein Standardtraktor der 150-PS-Klasse auch leistet: ziehen, heben sowie Zapfwellen- und Hydraulikleistung zur Verfügung stellen. Darüber hinaus hat der AgBot einen Hochvolt-Anschluss nach AEF-Norm mit 700 V Gleichstrom für elektrifizierte Anbaugeräte.
Amazone will nun Praxis-Erfahrungen sammeln. Es gilt herauszufinden, ob sich der Roboter nicht allein für einfache Arbeiten mit sozusagen „dummen“ Geräten wie Grubber oder Scheibenegge eignet, sondern auch für anspruchsvollere Aufgaben wie das Säen von Mais oder anderen Kulturen.
Mit dem Fronttank FTender 1 600 vorne und einer 3 m breiten Kombination aus Kreiselgrubber plus Keilringwalze und Precea-Einzelkornsägerät hinten sieht der AgXeed-Robotertraktor beeindruckend aus. Wird er tatsächlich autonom das Feld mit Mais bestellen können?
Per 40-km/h-Tieflader kam das Gespann zum Feld. Der Fliegl-Dreiachser DTS 300 mit 24 t zulässigem Gesamtgewicht eignet sich dafür gut. Mit 5,90 m passen die Tiefladelänge und mit 17,6 t die Nutzlast.
Das Abladen des Roboter-Geräte-Gespanns war schnell erledigt. Per Funkfernbedienung manövriert ein Mitarbeiter die später autonom arbeitende Einheit im Feld zum Startpunkt. Dafür muss er nicht unbedingt manuell lenken, sondern kann den AgBot auch selbsttätig zum Startpunkt navigieren lassen. Farbige LED-Leisten am AgXeed-Traktor zeigen an, ob sich der autonome Modus starten lässt. Dazu muss er einen Auftrag haben, sich innerhalb der Feldgrenze des zu bearbeitenden Schlages befinden sowie gültige GNSS- und RTK-Signale empfangen. Andernfalls leuchten die LEDs gelb, und ein Automatikbetrieb ist nicht möglich.
Die Feldgrenzen müssen zuvor einmalig von einer geschulten und von AgXeed autorisierten Person mit einem Vermessungsstab manuell per hochgenauem RTK-GNSS eingemessen worden sein. Dann eignen sie sich für den sogenannten Geofence, den virtuellen Zaun. Dieser muss zuverlässig verhindern, dass das autonome Gespann das Feld verlässt. Auch sollte der Vermesser Hindernisse mit ihren Ausmaßen RTK-genau digital markieren. Denn nur dann kann der Roboter exakt um ein Hindernis herum arbeiten.
Autonome Routen planen
Die Routenplanung führt der Betriebsleiter vorab in der Portalsoftware von AgXeed durch. Zu jedem autonomen Auftrag braucht der Roboter die Maße der angebauten Geräte. Daraus ergeben sich zum einen der Spurabstand und zum anderen der nötige Abstand zur Feldgrenze beim Wenden. Aus Sicherheitsgründen darf weder der Roboter über die Feldgrenze hinausfahren, noch dürfen die angebauten Geräte beim Wenden über die Feldgrenze hinausragen.
Außerdem muss der AgBot wissen, ob er das Vorgewende zuerst oder zum Schluss bearbeitet und in welcher Reihenfolge er das Spurmuster im Feld befahren soll. Festzulegen ist darüber hinaus die Anzahl an Vorgewendespuren. In einer Kartenansicht legt der Betriebsleiter den Startpunkt und den Endpunkt für den autonomen Auftrag fest. Das Planungstool gibt auf Basis der beiden Punkte und der Flächengeometrie automatisch ein Spurmuster vor.
Per Fernbedienung lassen sich unter anderem Fahrtrichtung und -geschwindigkeit regeln.
(Bildquelle: Tovornik)
Drückt ein Hindernis den weichen Bumper zusammen, bleibt der AgBot sofort stehen.
(Bildquelle: Tovornik)
Das Wendemanagement
Für die Wendemanöver muss der Roboter jeden einzelnen Schritt des Wendevorgangs kennen und nacheinander abarbeiten: Geräte auf die passende Höhe ausheben bzw. absenken, Zapfwelle zum richtigen Zeitpunkt ein- oder ausschalten, Fahrgeschwindigkeit reduzieren oder beschleunigen usw. Die Zeit- und Ortspunkte dafür setzt das Portal automatisch. Es müssen nur die gewünschten Höhen und Drehzahlen definiert werden. Das Feintuning z. B. von Fahrgeschwindigkeit oder Oberlenkerlänge macht der Roboterführer im Feld über die Fernbedienung.
Ein Ankunftsfenster im Portal zeigt die geplante Arbeitsdauer, die zurückzulegende Strecke sowie die geschätzte Ankunftszeit. Führt der AgBot gerade einen Auftrag aus, sieht der Portalnutzer den Anteil der bearbeiteten Fläche. Ein Live-Tracking soll laut AgXeed mit einem Update in Kürze kommen.
Ist der AgBot auf dem Feld am Startpunkt angekommen, aktiviert der Maschinenbediener den Automatikmodus. Der Feldroboter zieht daraufhin selbstständig seine Bahnen, so auch unsere AgBot-Amazone-Einzelkornsäkombi.
Am Tablet beobachtete ein Mitarbeiter ständig die Funktion der Sämaschine — so, wie es sonst der Traktorfahrer tun würde. Das ist dank der Cloud-Anbindung des Amazone-Terminals AmaTron 4 ohne Weiteres möglich. Das Tablet zeigt genau den gleichen Bildschirm wie das normalerweise in der Traktorkabine montierte Terminal. Für den mobilen Datenversand war das AmaTron-Terminal bei unserem Einsatz auf dem AgBot in dessen Wifi-Netz integriert.
Zukünftig soll das jetzt noch auf dem AgBot untergebrachte AmaTron 4-Terminal überflüssig werden. Und auch die Tablet-Bedienung soll smarter werden. So will AgXeed z. B. auf dem Serienmodell des AgBot zwei 180-Grad-Kameras installieren, die Bilder ins Portal senden. Der Bediener kann dann das Arbeitsergebnis aus der Ferne mit jedem internetfähigen Gerät überwachen.
AgBot-Geräte-Kommunikation
Eine Kommunikation zwischen dem AgBot und den Amazone-Geräten war bei dem eingesetzten Prototyp lediglich als Idee vorhanden. Mit dem für die Serie vorgesehenen ISO-Bus-Standard und dem Traktor-Implement-Management (TIM) werden im nächsten Entwicklungsschritt verschiedene Funktionalitäten möglich, die dann die Arbeit mit dem Robotergespann optimieren. So ließe sich z. B. ein Stopp des Roboters automatisch einleiten, wenn die Rutschkupplung des Kreiselgrubbers anspricht oder die nachlaufende Walze schiebt. Für die nächste Saison in Vorbereitung hat Amazone das Versenden von Daten der Vereinzelungsüberwachung in das AgXeed-Portal. Je nach dem, ob bei der Vereinzelung Fehler auftreten, könnte dem Roboter dann automatisch mitgeteilt werden, seine Fahrgeschwindigkeit zu verringern.
Das Raupenfahrwerk des AgBot ist elektrisch angetrieben.
(Bildquelle: Tovornik)
Dreipunkthubwerk, Zapfwelle, Hydraulik… — Funktionen wie beim Standardtraktor.
(Bildquelle: Tovornik)
Der 3D-Laserscanner soll Hindernisse aufspüren. Hier stören jedoch Anbaugeräteteile.
(Bildquelle: Tovornik)
Mit einer Portal-Software plant der Betriebsleiter die Spuren für den autonomen Auftrag.
(Bildquelle: Tovornik)
Sicherheit im Feld
Bislang teilweise rudimentär umgesetzt war bei dem Prototyp-Robotergespann das Sicherheitskonzept. Das Geofencing war aktiv. Für einen von Hand auslösbaren Notstopp waren rund um das Gespann insgesamt acht Notaus-Taster montiert.
Zusätzlich hatte AgXeed vorne am Fronttank einen Bumper angebracht, der auf Druck reagiert, sowie sechs Ultraschall- und zwei Radarsensoren — alle diese Sensoren waren bei unserem Einsatz noch ohne Funktion. Und der 3D-Laserscanner auf dem AgBot konnte nicht über die Anbaugeräte hinwegsehen. Bei der Serienfertigung will AgXeed solche Fälle berücksichtigen.
Sind alle Sensoren zur Hinderniserkennung in Betrieb, so reduziert der AgBot zunächst seine Fahrgeschwindigkeit, wenn der Laser oder die anderen Sensoren ein Hindernis erkennen. Ein Bumperkontakt bewirkt immer sofort einen Notstopp.
Fazit
Noch befindet sich die Kombination von AgBot-Feldroboter mit Amazone-Geräten im Prototypenstadium. Trotzdem konnte AgXeed bei unserem Einsatz zeigen, dass die autonome Maisaussaat mit 3 m breiten Anbaugeräten von Amazone funktioniert. Für eine benutzerfreundliche Bedienung und Überwachung des Systems will AgXeed 180-Grad-Kameras installieren, eine App entwickeln und über das Portal ein Live-Tracking ermöglichen. Außerdem sollen der Roboter und die Geräte künftig über den ISO-Bus und per TIM Informationen und Befehle direkt austauschen können.